設備
Ocean-Going AUVs ROBOCON-Class AUVs Seafloor Platforms Surface Platforms
Ocean-Going AUVs
MONACA (モナカ)
GRAntarcticプロジェクトにて開発中の、海氷や棚氷の下の調査用AUV。正式名称はMobility Oriented Nadir AntarctiC Adventurer。最大深度1500m。HATTORIの海底追従アルゴリズムおよび上下に向きを変更可能なセンサユニットにより、複雑な海底面および氷下面に対して一定高度を保ちつつ航行できる。
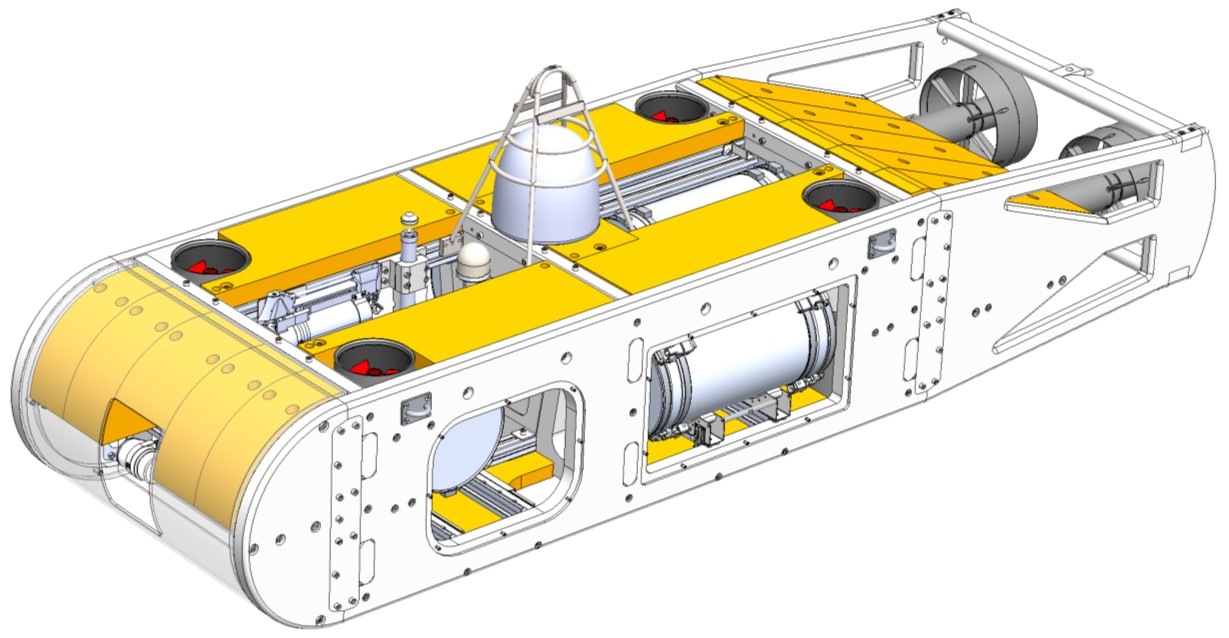
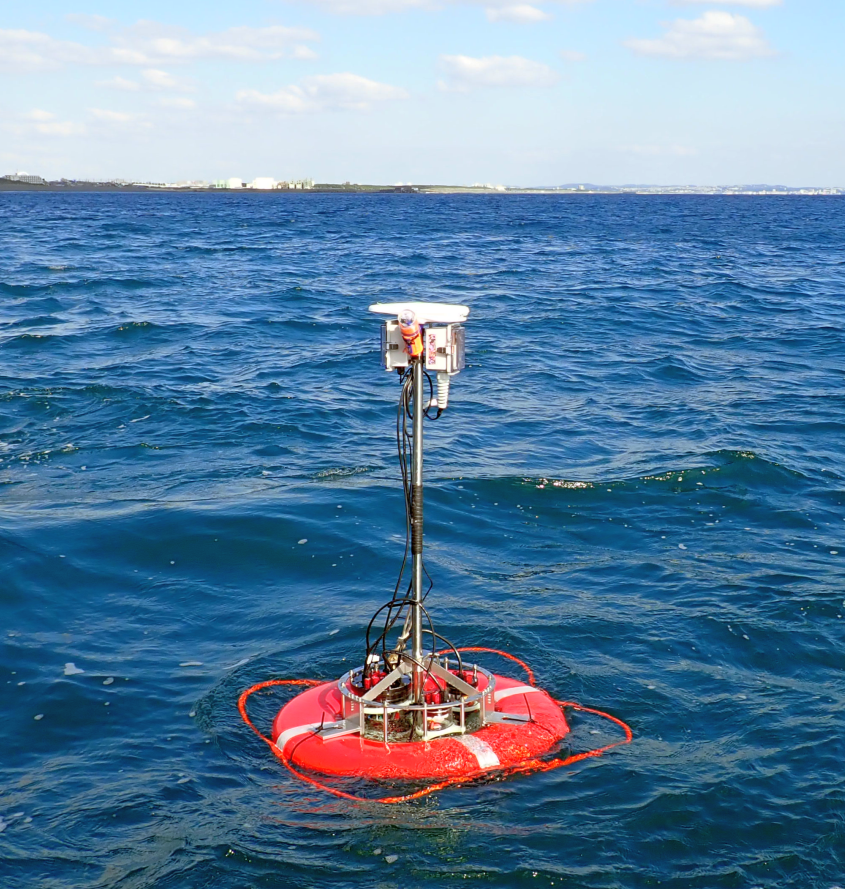
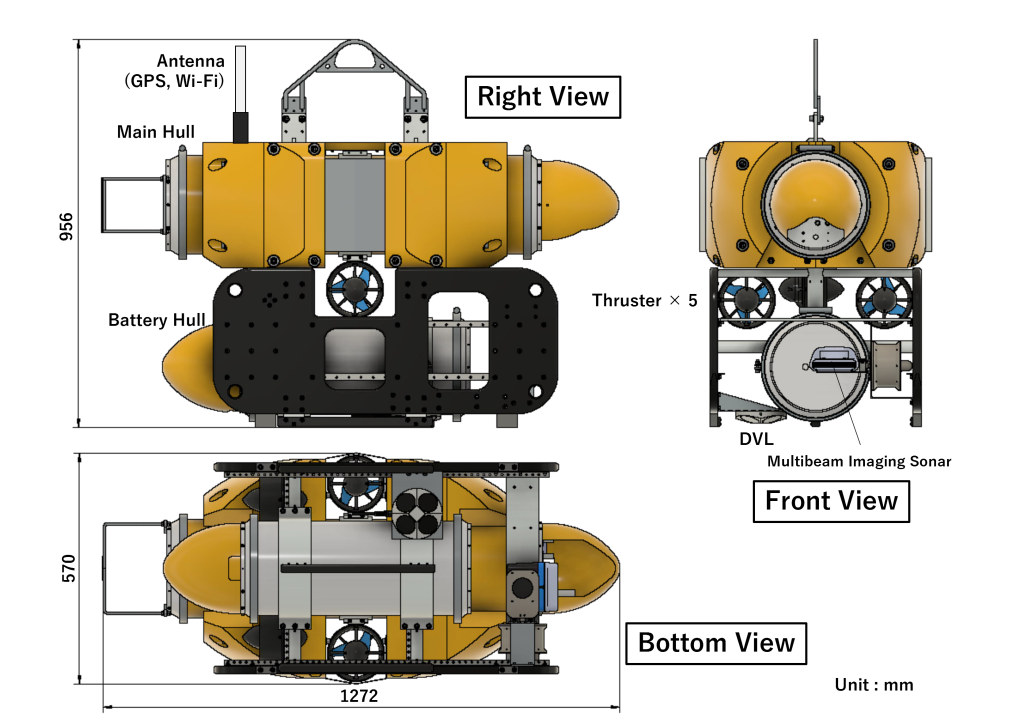
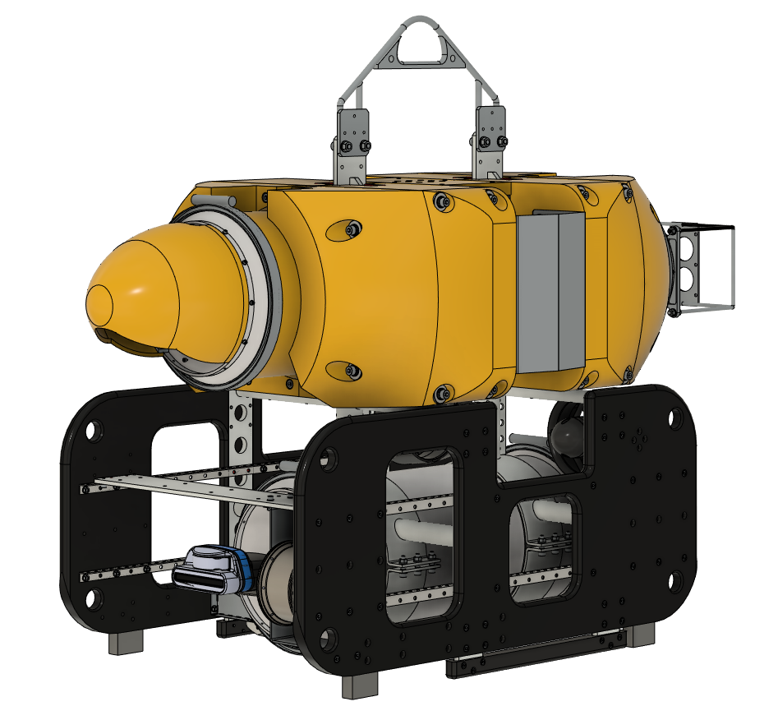
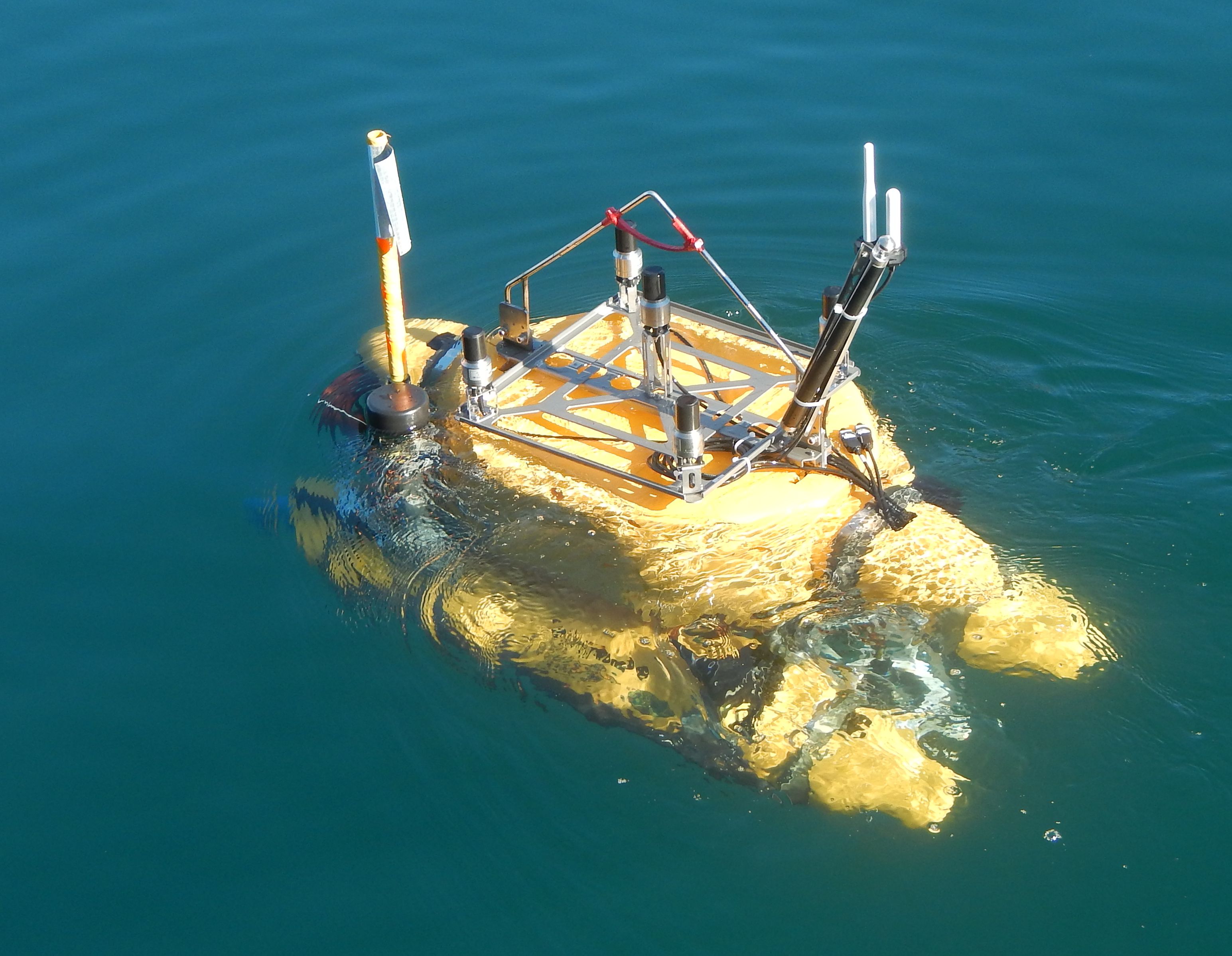
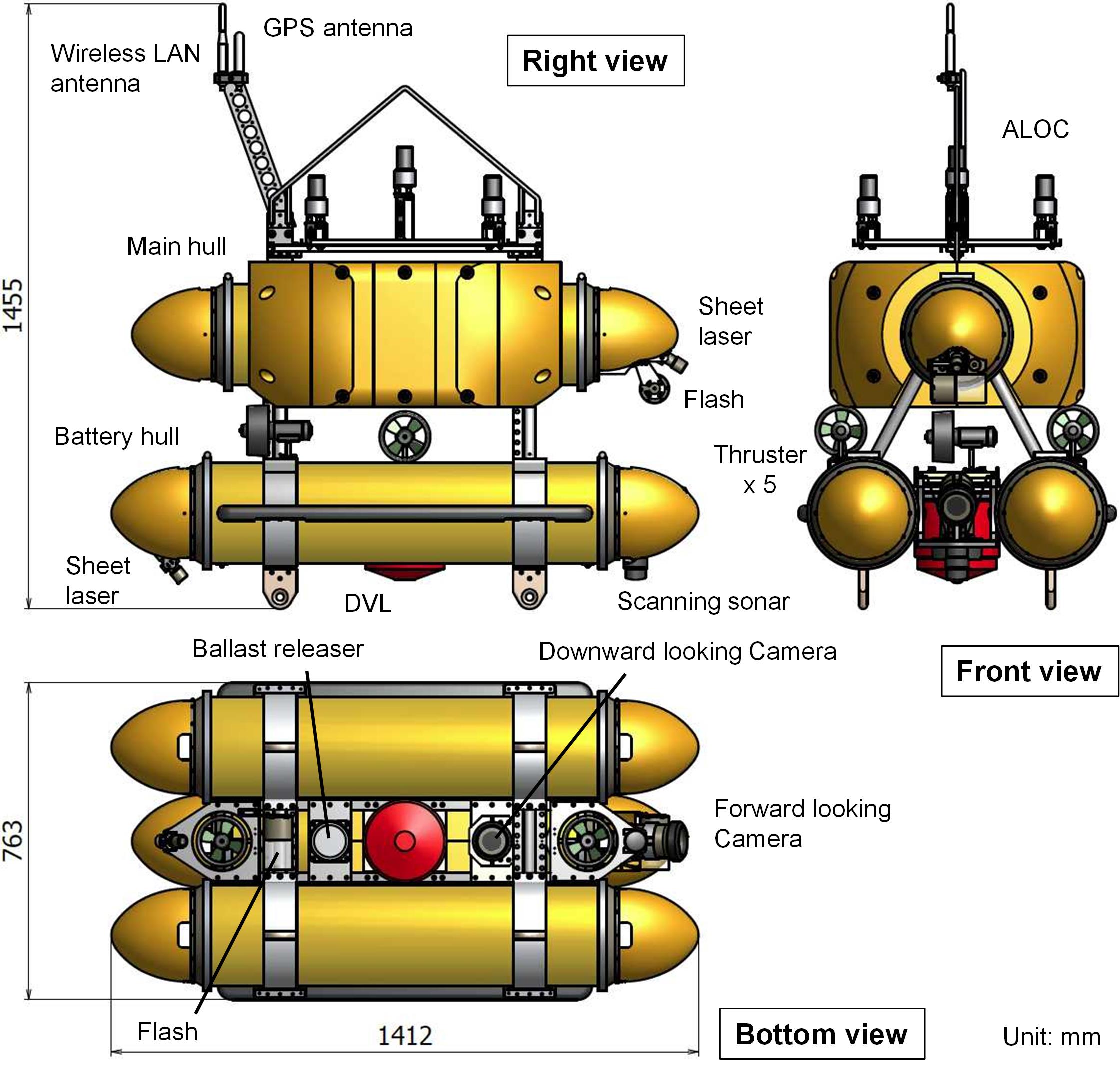
新 Tri-TON (シン・トライトン)
元々は2011年に完成したホバリング型AUV (資料)。最大深度800m。2023年、海洋生物や浮体構造物、係留索等の観測に対応するために生まれ変わった。機動性が向上したほか、首振り式のマルチビームイメージングソーナーと高性能なコンピュータを搭載している。
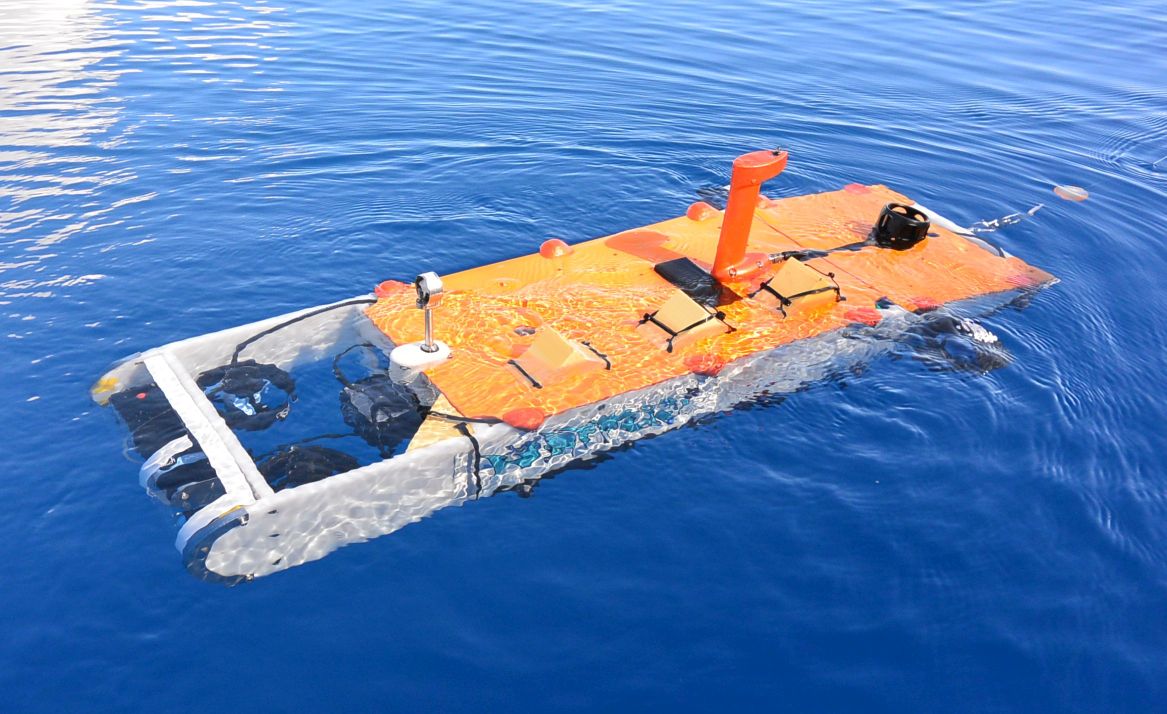
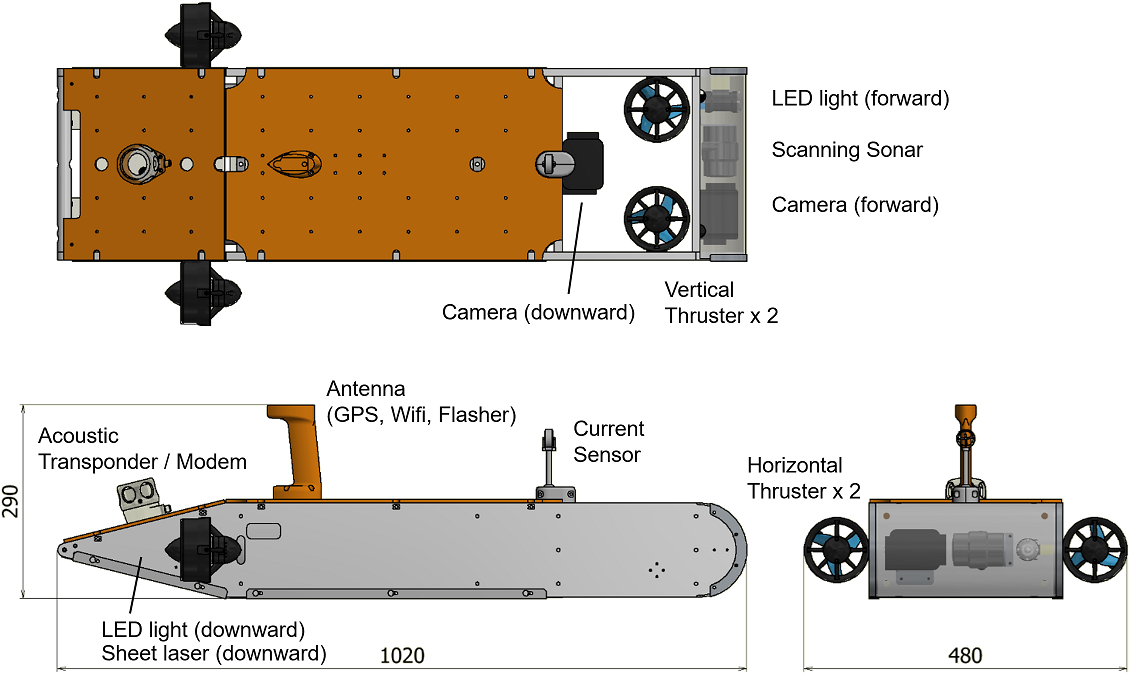
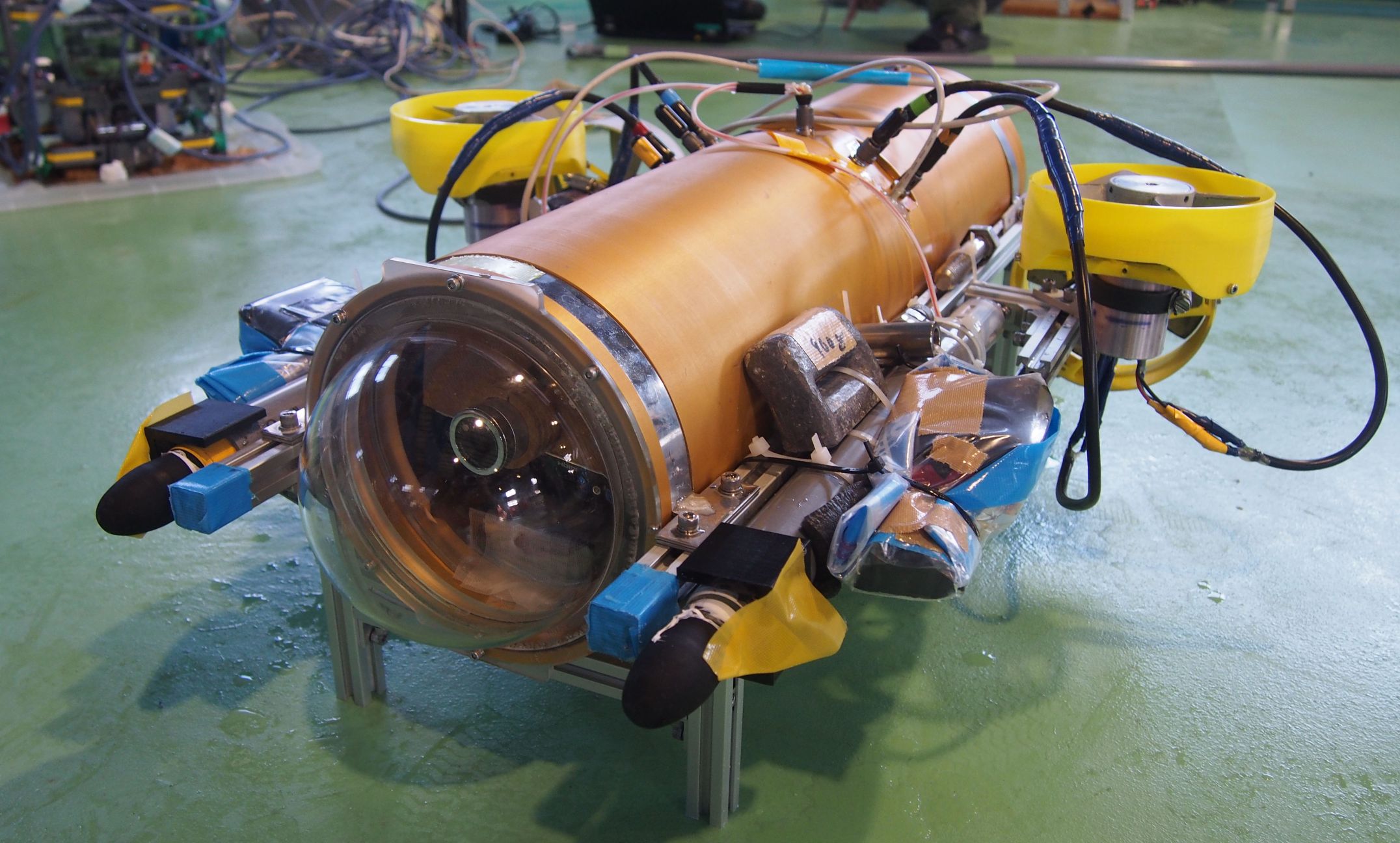
HATTORI (ハットリ)
クレーン無しで運用可能な小型軽量のクルーズ型AUV。名前はHighly Agile Terrain Tracker for Ocean Research and Investigationより。汎用パーツやROS(Robot Operating System)の採用により、低コストで使いやすいAUVを目指して開発中。スキャニングソーナーを用いたアルゴリズムにより、海底を高速かつ低高度で追従することができる。
HATTORI & BUTTORI (2020.11@下田)
AUV HATTORI test dive (2016.12@Misaki Speed x4)
自律型海中ロボットHATTORIの開発(海洋技術環境学専攻 実験動画ギャラリー)
Tri-TON 2 (トライトン ツー)
2013年に完成したホバリング型AUV。Tri-TONとほぼ同じ構成であるが、最大深度が2,000mに強化されているほか、各種改良がなされている。
HATTORI 2 (ハットリ ツー)
HATTORIをベースとして株式会社FullDepthと共同開発したAUV。クレーン無しで運用できるサイズに抑えつつ、実用機としての頑丈さとメンテナンス性を備えている。2018年11月に石垣島の石西礁湖へ展開し、サンゴ礁の画像マッピングに成功した。最大深度は300m。
Tri-Dog 1 (トライドッグワン)
1999年に浦研究室で開発されたホバリング型AUV 水槽試験用のテストベッドではあるが、改造により実海域への展開能力を獲得。釜石湾、琵琶湖、鹿児島湾等で多数の運用実績を持つ。2012年からは相互ランドマーク測位手法の実証機として使われている。最大深度は110m。 もっと詳しく


ROBOCON-Class AUVs
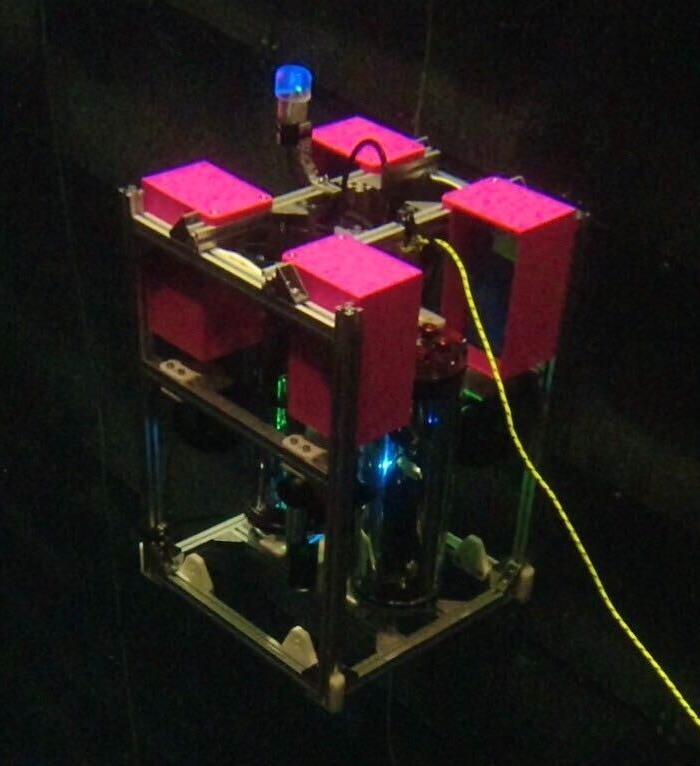
ARIEL (アリエル)
2021年にMinty Rollをベースとして開発されたホバリング型AUV。AIによる高度な画像処理能力を備える。
水中ロボコン in JAMSTEC 2021 ポスター プレゼン動画 デモ動画
Yebis-URA (エビスラ)
浦研究室で開発された小型ホバリング型AUV。2013年より子機発射機能が実装された。
Seafloor Platforms
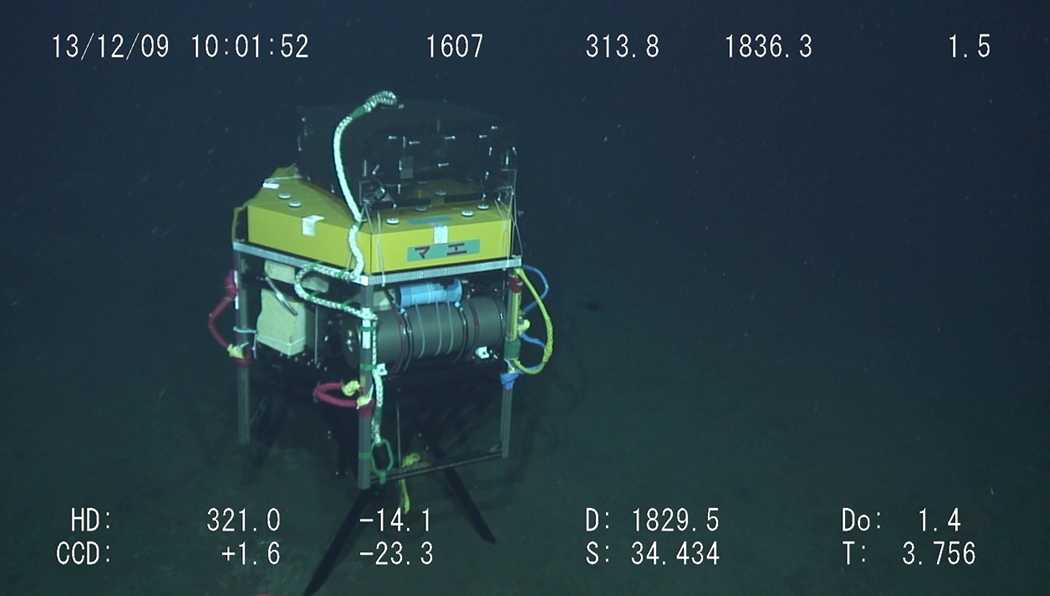
海底ステーション C型
2013年に開発された。3本のパンタグラフ方式の脚機構により、斜面や凹凸の激しい海底であっても水平姿勢を保つことができる。2013年12月に沖縄トラフ伊良部海丘の熱水域(水深約1,800m)への展開に成功。
海底ステーション B型
2012年春に新たに開発されたステーション。A型の機能に加え、AUVがドッキングするための台座と、精密測位用のLEDアレイを装備している。
海底ステーション A型
海底に設置して、AUVの測位基準として用いられる。上部に取り付けられているのが送受波器。AUVにも同様の装備を取り付けることで、相互の位置関係を求めることができる。CTDや流速計等、各種センサを取り付けることも可能。

Surface Platforms
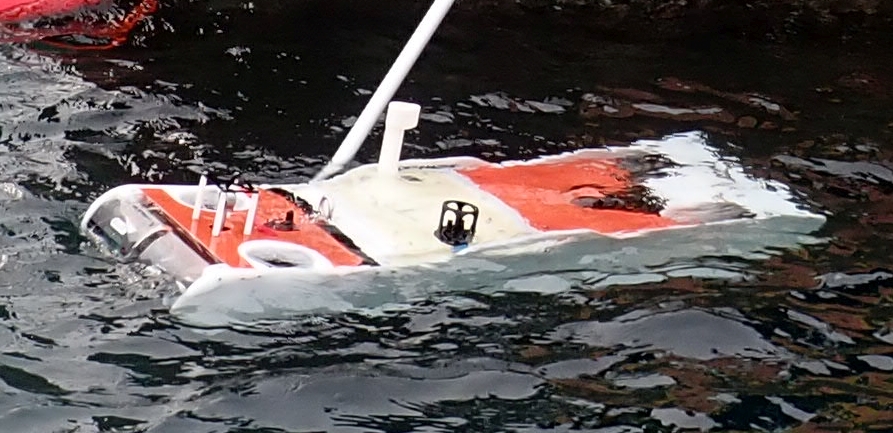
BUTTORI
AUVの運用支援用のブイ型のASV(Autonomous Surface Vehicle)。2018年より開発中。波浪や強風にも対応できる高い位置保持能力を持つほか、測位中のAUVを追跡する機能を開発中。