Equipment
Tri-Dog 1
Hovering-type AUV developped at Ura lab. in 1999. This vehicle has been operated at various fields such as Kamaishi Bay, Lake Biwa, and Kagoshima Bay.


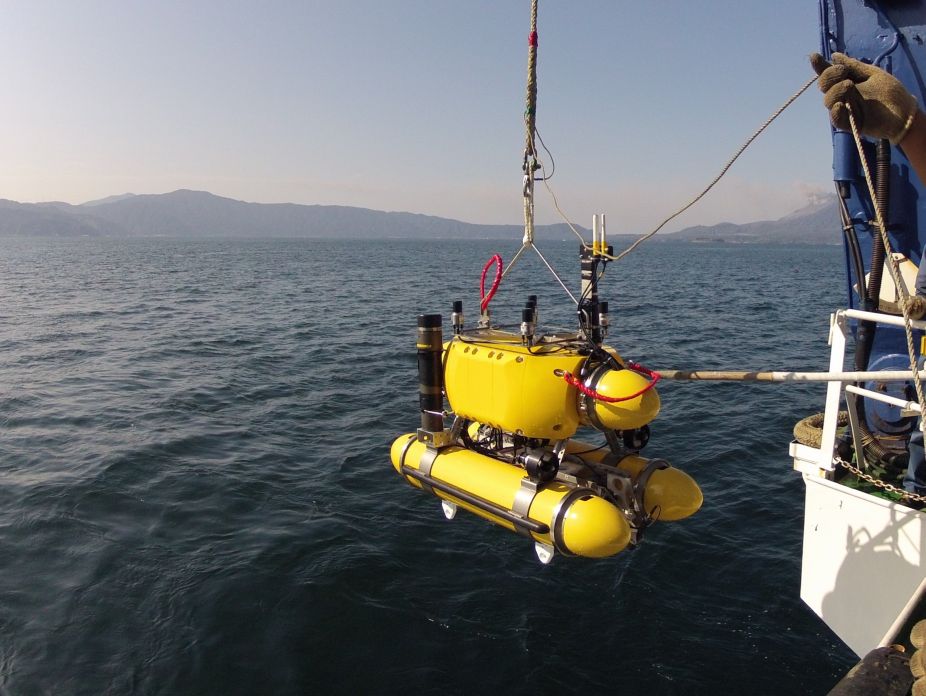
Tri-TON
Hovering-type AUV developped in 2011 as a successor to Tri-Dog 1. Depth rating is 800m. Imaging devices are mounted both in forward and downward directions, in order to observe not only flat seafloor but also vertical surfaces like chimneys.
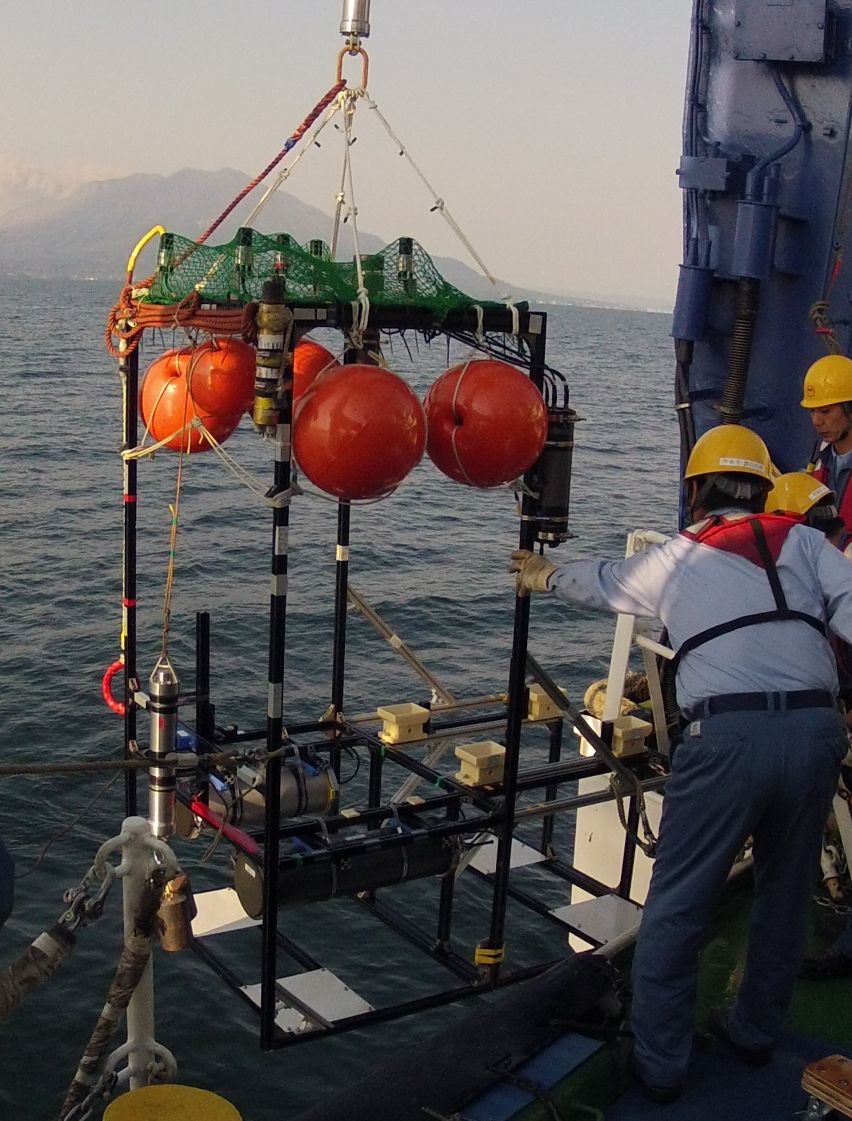
Seafloor Station type A

Seafloor Station type B